Raspberry Cat Feeder#
Title: Raspberry Cat Feeder Date: 2023-09-22 Tags: raspberry pi, python, blender Slug: raspberry-cat-feeder Author: DGP Summary: An automatic cat feeder powered by a raspberry pi
Overview#
The Raspberry Cat Feeder is a an automatic cat feeder powered by Raspberry Pi. The [rcf] can be programmed to feed at prescribed intervals or on demand through a web interface.
Design goals for the project include:
assembled from inexpensive, commonly accessible hardware using simple hand tools available to the average DIYer.
provide food for extended away intervals
be reliable and low maintenance
be rodent and vermin “proof “
Mechanical#
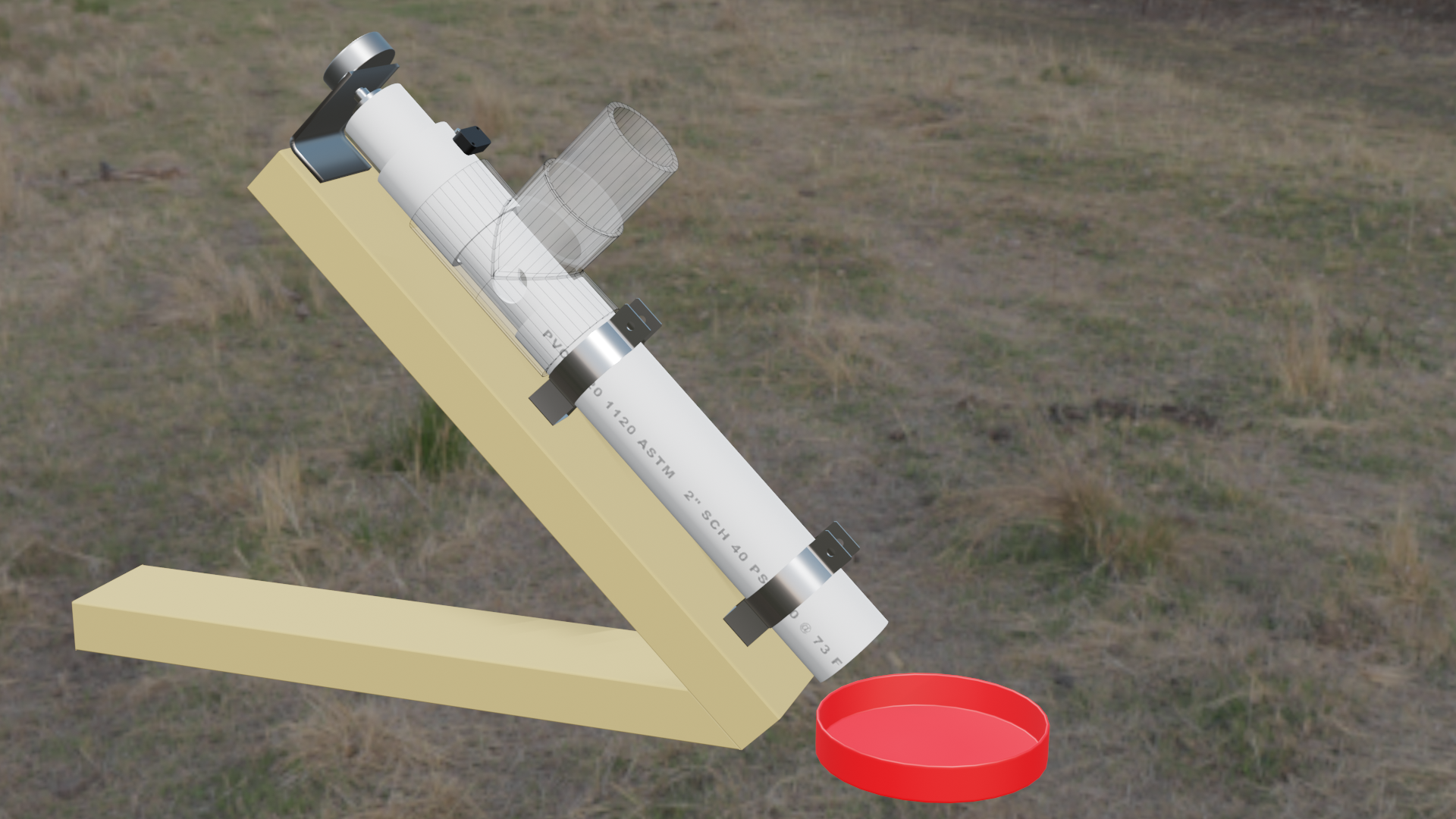
A short animation showing the mechanical concept. Cat Feeder
Circuit Diagram#
A circuit diagram is shown below as well as a list of the major components used in the prototype version built. The selection of these components was strictly based on parts available on hand at the time.
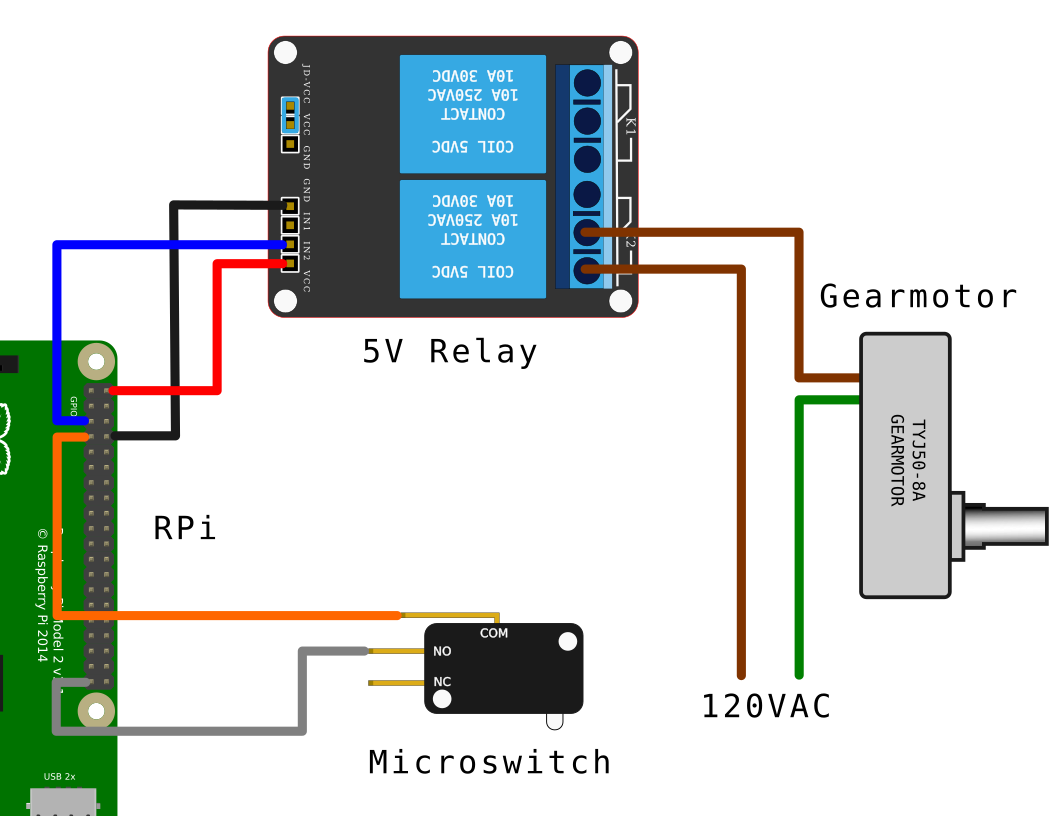
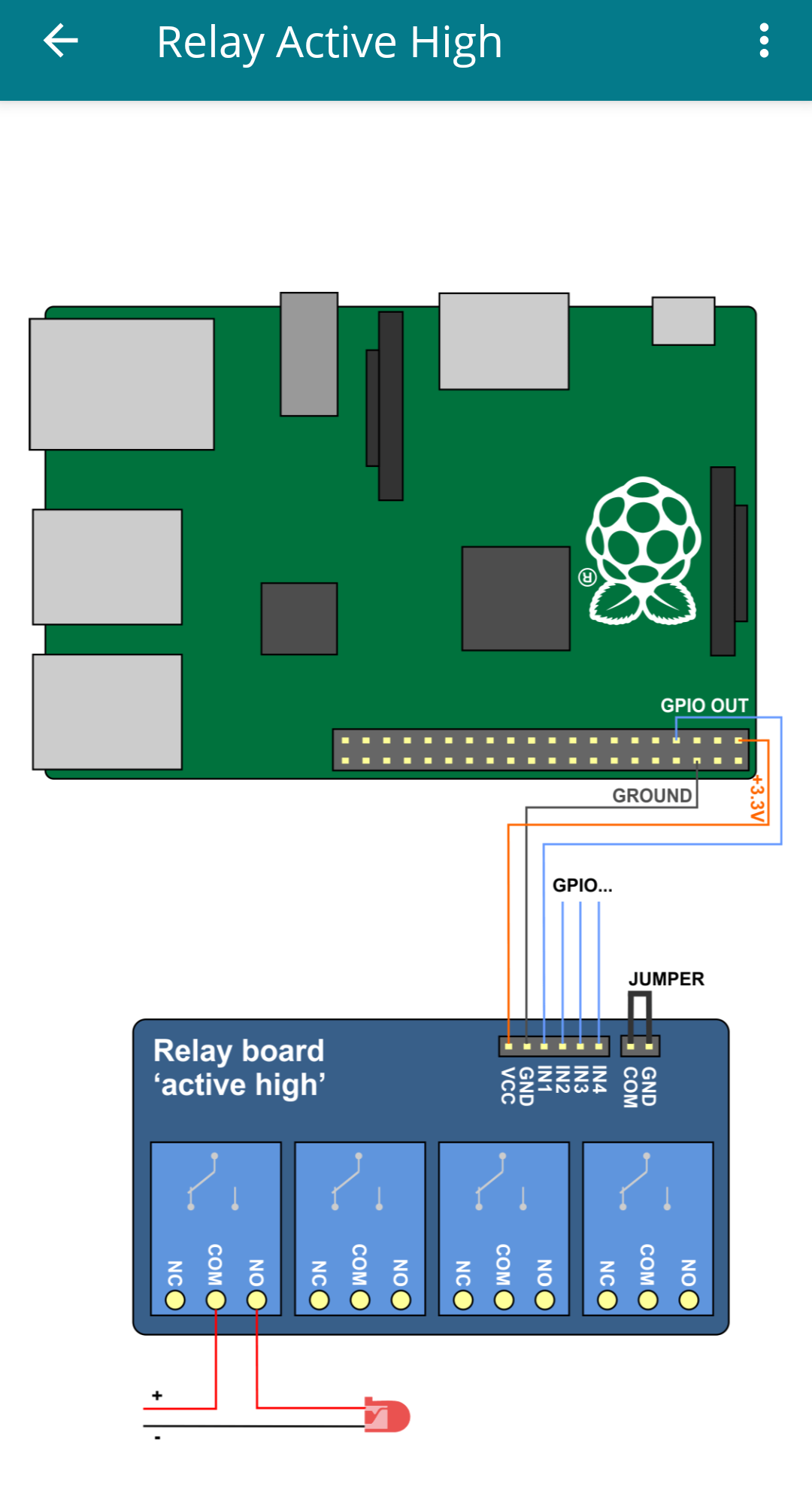
N.B. some of these relay modules may behave differently. Caution should be exercised - transistor driver circuits and or pull up/down resistors may be required to ensure reliable relay operation and or damage to the pi.
This is probably better.
Software#
Control#
The cat feeder code is largely written in Python and utilizes the GPIOZero library for driving board’s input/output.
here is an early version of the basic motor control:
#! /usr/bin/python3
from time import sleep
from gpiozero import DigitalOutputDevice
from gpiozero import OutputDevice
from gpiozero import Button
import history
switch = Button(4)
relay = OutputDevice(3,active_high=True,initial_value=True,pin_factory=None)
def motor_off():
# active low relay so reverse logic
print("off")
relay.on()
history.write_event()
def motor_on():
# active low relay so reverse logic
print("on")
relay.off()
def feed():
print("feed")
delay = 24.0
dwell = 2
motor_on()
sleep(dwell) #move off limit switch
made = switch.wait_for_press()
print("switch")
if made:
motor_off()
Web interface#
The web interface uses the NiceGUI framework.
I will include that code as the project continues …
[rcf]:
#raspberry-cat-feeder